Серия электрических захватов HITBOT – Z-EFG-R – совместный электрический захват



Основная категория
Промышленные роботизированные манипуляторы / Коллаборативные роботизированные манипуляторы / Электрические захваты / Интеллектуальные приводы / Решения для автоматизации
Приложение
Роботизированные захваты серии SCIC Z-EFG отличаются компактными размерами и встроенной сервосистемой, что позволяет добиться точного контроля скорости, положения и силы зажима. Передовая система захвата SCIC для автоматизированных решений откроет перед вами новые возможности автоматизации задач, о которых вы раньше и не подозревали.

Особенность

·Небольшой, но мощный электрический захват с сервомотором.
·Терминалы могут быть заменены в соответствии с различными требованиями проекта.
·Может поднимать хрупкие и деформируемые предметы, такие как яйца, пробирки, кольца и т. д.
·Подходит для помещений без источников воздуха (например, лабораторий и больниц).
Интегрированная сервосистема применяется для выполнения различных запросов.
Большая сила зажима
Усилие зажима: 80 Н.
ход поршня: 20 мм
Контроль точности
Повторяемость: ±0,02 мм
Подключи и работай
Специально разработано дляшестиосевой электрический захват
Контроллер встроен.
Небольшая площадь покрытия, удобна для интеграции.
Хвост можно изменить
Его хвостовую часть можно изменять в соответствии с различными запросами.
Мягкое зажимание
Оно может зажимать хрупкие предметы.

● Способствует революции в замене пневматических захватов электрическими, первый в Китае электрический захват со встроенной сервосистемой.
● Идеальная замена для воздушного компрессора + фильтра + электромагнитного клапана + дроссельной заслонки + пневматического захвата
● Многократный срок службы, соответствующий традиционному японскому цилиндру.




Параметры спецификации
Z-EFG-R — это роботизированный электрический захват со встроенным контроллером и множеством функций в одном устройстве. Небольшой по размеру, но мощный по своим возможностям.
● Небольшой, но мощный электрический захват с сервомотором.
●Терминалы могут быть заменены в соответствии с различными требованиями проекта.
● Может поднимать хрупкие и деформируемые предметы, такие как яйца, пробирки, кольца и т. д.
● Подходит для помещений без источников воздуха (например, лабораторий и больниц).
Z-EFG-R — это небольшой электрический захват со встроенной сервосистемой, который может заменить насос + фильтр + электромагнитный клапан + дроссельный клапан + пневматический захват.
| Модель № Z-EFG-R | Параметры |
| Полный инсульт | 20 мм |
| Сила захвата | 80Н |
| Повторяемость | ±0,02 мм |
| Рекомендуемый вес захвата | 0,8 кг |
| Режим передачи | Зубчатая рейка + Поперечная роликовая направляющая |
| Смазка движущихся компонентов | Каждые шесть месяцев или 1 миллион перемещений/раз. |
| Время одностороннего движения при ударе | 0,45 с |
| Диапазон рабочих температур | 5-55℃ |
| Диапазон рабочей влажности | Относительная влажность 35-80% (без образования инея) |
| Режим движения | Два пальца двигаются горизонтально. |
| контроль гребка | Регулируемый |
| Регулировка силы зажима | Регулируемый |
| Масса | 0,5 кг |
| Габариты (Д*Ш*В) | 68*68*132,7 мм |
| размещение контроллера | Встроенный |
| Власть | 5W |
| Тип двигателя | бесщеточный двигатель постоянного тока |
| Номинальное напряжение | 24 В |
| Пиковый ток | 1A |
| Адаптируемая шестиосевая роботизированная рука | УР, Аубо |
Управление и контроллер встроены.
Z-EFG-R — это небольшой электрический захват со встроенной сервосистемой, который может заменить воздушный насос + фильтр + электромагнитный клапан + дроссельный клапан + воздушный захват.


Совместим с шестиосевым роботизированным манипулятором.
Захват совместим с основными шестиосевыми роботизированными манипуляторами, обеспечивая принцип «подключи и работай». Он имеет ход 20 мм, усилие зажима 80 Н, а ход и усилие зажима можно регулировать.
Компактные размеры, простота установки.
Габариты Z-EFG-R составляют L68*W68*H132,7 мм, он имеет компактную конструкцию, поддерживает различные способы установки, имеет встроенный контроллер, занимает мало места и легко применяется для решения различных задач зажима.

Быстрая реакция, точный контроль
Минимальное время перемещения за один ход составляет 0,45 с, повторяемость — ±0,02 мм, хвостовая часть легко заменяется, заказчики могут зажимать объект в соответствии со своими потребностями.
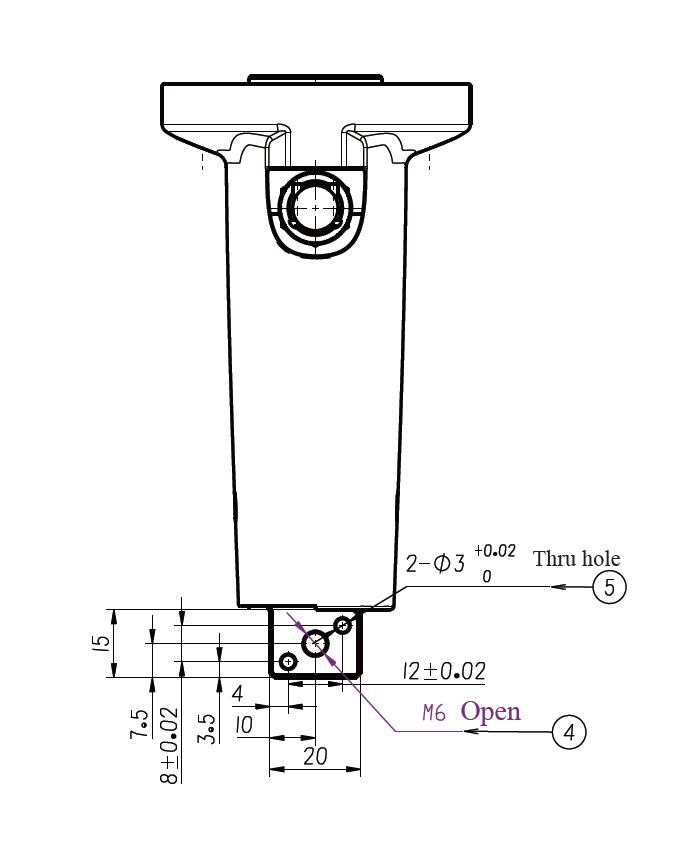
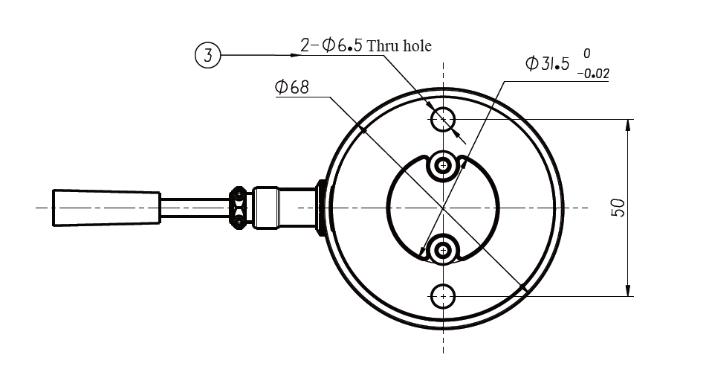
Схема монтажа с указанием размеров
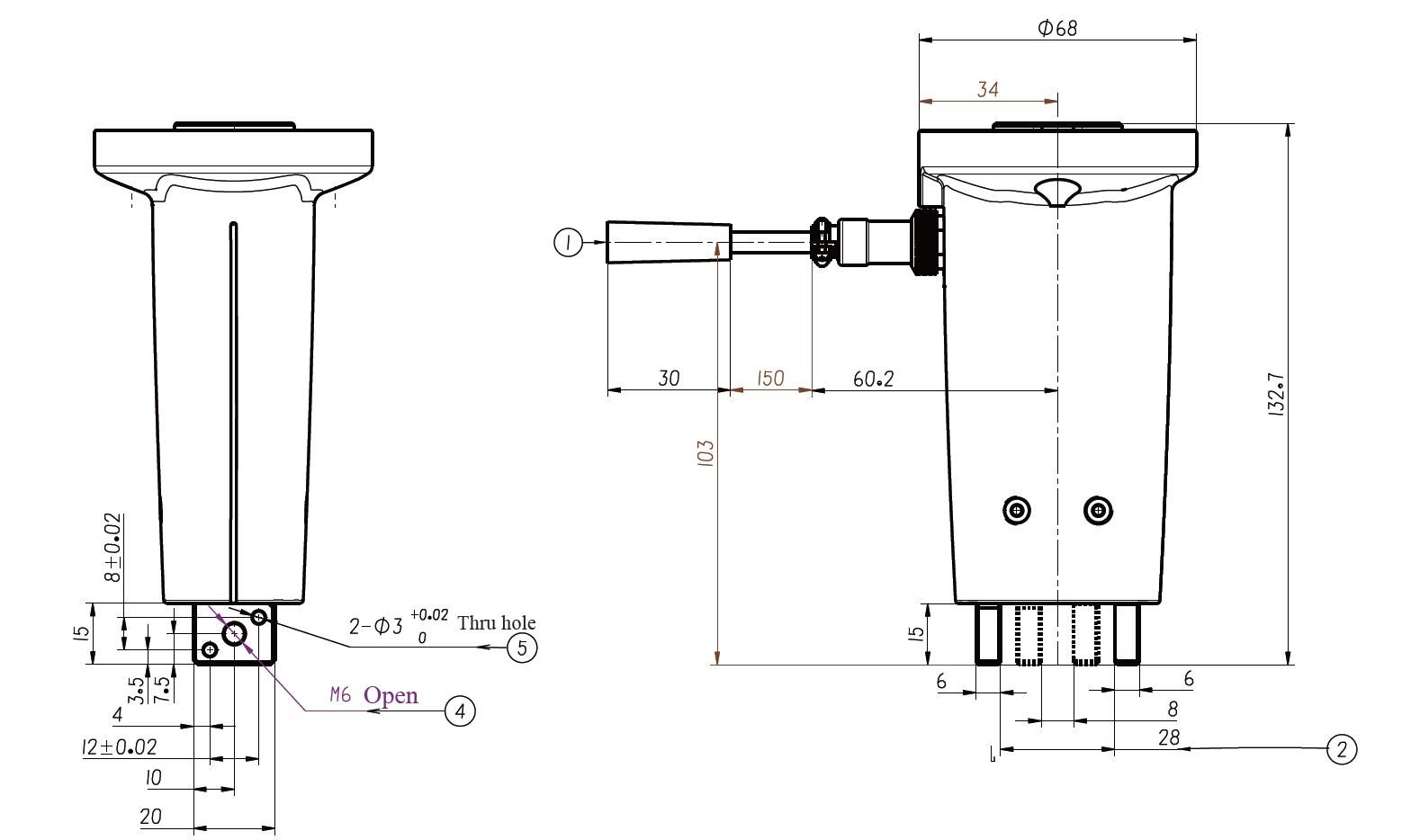
① Пятижильный авиационный штекер RKMV8-354 к разъему RKMV8-354
② Ход электрического захвата составляет 20 мм.
③ Для установки используйте два винта M6 для соединения с фланцем на конце манипулятора робота UR.
④ Место установки, место установки крепежного элемента (винт M6)
⑤ Положение установки, положение для установки крепления (3 цилиндрических отверстия для штифтов)
Электрические параметры
Номинальное напряжение 24±2 В
Ток 0,4 А

Наш бизнес


Категории товаров
-

Сервоэлектрический захват DH ROBOTICS серии PGE –...
-

Сервоэлектрический захват DH ROBOTICS серии RGI –...
-

Сервоэлектрический захват DH ROBOTICS серии PGE –...
-

СЕРИЯ ЭЛЕКТРИЧЕСКИХ ЗАХВАТОВ HITBOT – Z-EFG-50 Paral...
-

Сервоэлектрический захват DH ROBOTICS серии RGI –...
-

HITBOT ELECTRIC Gripper SERIES – Z-EFG-40...