Роботизированные манипуляторы SCARA – Z-Arm-4160B – коллаборативный роботизированный манипулятор





Основная категория
Промышленные роботизированные манипуляторы / Коллаборативные роботизированные манипуляторы / Электрические захваты / Интеллектуальные приводы / Решения для автоматизации
Приложение
Коботы SCIC Z-Arm — это легкие 4-осевые коллаборативные роботы со встроенным приводным двигателем, которые, в отличие от традиционных роботов SCIC, не требуют редукторов, что снижает их стоимость на 40%. Коботы SCIC Z-Arm могут выполнять такие функции, как 3D-печать, перемещение материалов, сварка и лазерная гравировка. Они способны значительно повысить эффективность и гибкость вашей работы и производства.
Функции

Высокая точность
Повторяемость
±0,02 мм
Настраиваемая ось Z
0,1-0,8 м
Большой полезный груз
Подставка 4 кг
Максимум 5 кг
Более высокая скорость
Максимальная линейная скорость 2 м/с
(Нагрузка 5 кг)
Роботизированная рука с большим размахом стрелы, высокой точностью и 4 осями, простая в использовании.
Высокая точность
Повторяемость: ±0,02 мм
Большой размах рук
Ось J1: 325 мм,Ось J2: 275 мм
Настраиваемая ось Z
Ход струи вверх-вниз можно регулировать в диапазоне от 0,1 м до 0,8 м.
Экономия места
Привод/контроллер встроен.
Простой и удобный в использовании
Даже новичок, незнакомый с роботизированной рукой, легко освоит её использование, интерфейс достаточно прост.
Высокоскоростной
Его скорость составляет 2000 мм/с при нагрузке 4 кг.

Сопутствующие товары



Параметры спецификации
Робот SCIC Hitbot Z-Arm 4160B, разработанный компанией SCIC Tech, представляет собой легкий коллаборативный робот, простой в программировании и использовании, поддерживающий SDK. Кроме того, он поддерживает обнаружение столкновений, то есть автоматически останавливается при касании человека, что обеспечивает интеллектуальное взаимодействие человека и машины и высокий уровень безопасности.
| Коллаборативный роботизированный манипулятор Z-Arm 4160B | Параметры |
| длина плеча по одной оси | 325 мм |
| угол поворота по оси 1 | ±90° |
| Длина 2-осевого рычага | 275 мм |
| угол поворота по двум осям | ±164° Дополнительно: 15-345° |
| ход по оси Z | 410 Высота может быть настроена индивидуально. |
| Диапазон вращения по оси R | ±1080° |
| Линейная скорость | 2000 мм/с (полезная нагрузка 4 кг) |
| Повторяемость | ±0,02 мм |
| Стандартная полезная нагрузка | 4 кг |
| Максимальная полезная нагрузка | 5 кг |
| Степень свободы | 4 |
| Источник питания | Адаптер 220 В/110 В, 50-60 Гц, пиковая мощность 48 В постоянного тока, 960 Вт. |
| Коммуникация | ЭН |
| Расширяемость | Встроенный контроллер движения обеспечивает 24 входа/выхода, а также возможность расширения под манипулятором. |
| По высоте оси Z можно настроить параметры. | 0,1 м ~ 0,8 м |
| обучение перемещению по оси Z | / |
| Электрический интерфейс зарезервирован | Стандартная конфигурация: провода 24*23awg (неэкранированные) от панели розеток через нижнюю крышку рычага. Дополнительно: 2 вакуумные лампы φ4, проходящие через панель разъемов и фланец. |
| Совместимые электрические захваты HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Дыхание света | / |
| Диапазон движений второй руки | Стандартный угол: ±164° Дополнительный угол: 15-345° |
| Дополнительные аксессуары | / |
| Используйте окружающую среду | Температура окружающей среды: 0-45°C Влажность: 20-80% относительной влажности (без образования инея) |
| Цифровой вход порта ввода/вывода (изолированный) | 9+3+разгибание предплечья (опционально) |
| Цифровой выход порта ввода/вывода (изолированный) | 9+3+разгибание предплечья (опционально) |
| Аналоговый вход порта ввода/вывода (4-20 мА) | / |
| Аналоговый выход порта ввода/вывода (4-20 мА) | / |
| высота роботизированной руки | 860 мм |
| вес роботизированной руки | Ход поршня 410 мм, вес нетто 36,5 кг |
| Базовый размер | 250 мм * 250 мм * 15 мм |
| Расстояние между отверстиями для крепления основания | 200 мм * 200 мм, четыре винта M8 * 20 |
| Обнаружение столкновений | √ |
| Обучение перетаскиванию | √ |
Идеальный выбор для выполнения несложных сборочных работ.
Z-Arm XX60B — это 4-осевой роботизированный манипулятор с большим размахом стрелы, занимающий небольшую площадь, идеально подходящий для установки на рабочем месте или внутри станка. Он является идеальным выбором для выполнения легких сборочных работ.


Легкий вес и большой угол поворота

Вес изделия составляет около 36,5 кг, максимальная нагрузка — до 5 кг, угол поворота по оси 1 — ±90°, угол поворота по оси 2 — ±164°, диапазон поворота по оси R — до ±1080°.
Большой размах рук, широкое применение

Z-Arm XX60B имеет большой размах рычага: длина по одной оси составляет 325 мм, по двум осям — 275 мм, а линейная скорость может достигать 2000 мм/с при нагрузке 4 кг.


Гибкость развертывания, быстрая смена режима работы.
Z-Arm XX60B обладает такими характеристиками, как малый вес, компактность и гибкость в развертывании, подходит для использования во многих областях применения и не меняет прежнюю компоновку производства, включая быструю смену последовательности процессов и выполнение мелкосерийного производства и т. д.
Перетащите обучение, чтобы завершить программу

Программное обеспечение основано на графическом дизайне и включает в себя базовые функциональные модули: точка, выходной сигнал, электрический захват, лоток, задержка, подпроцесс, сброс и другие. Пользователи могут перетаскивать модули для управления роботизированной рукой в области программирования. Интерфейс простой, но функциональный.
Диапазон движений, версия M1 (поворот наружу)
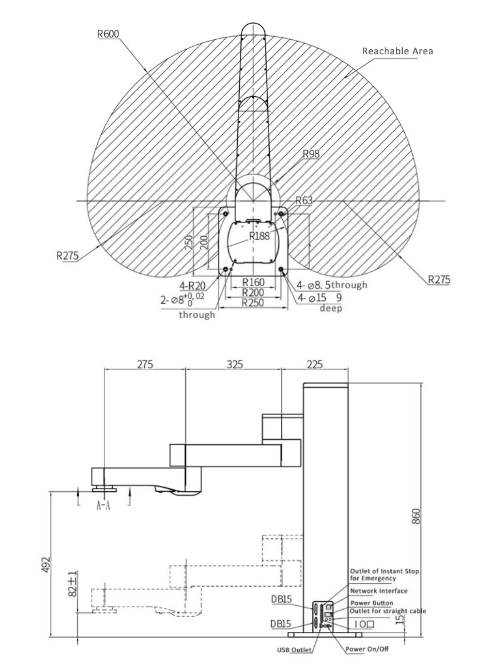
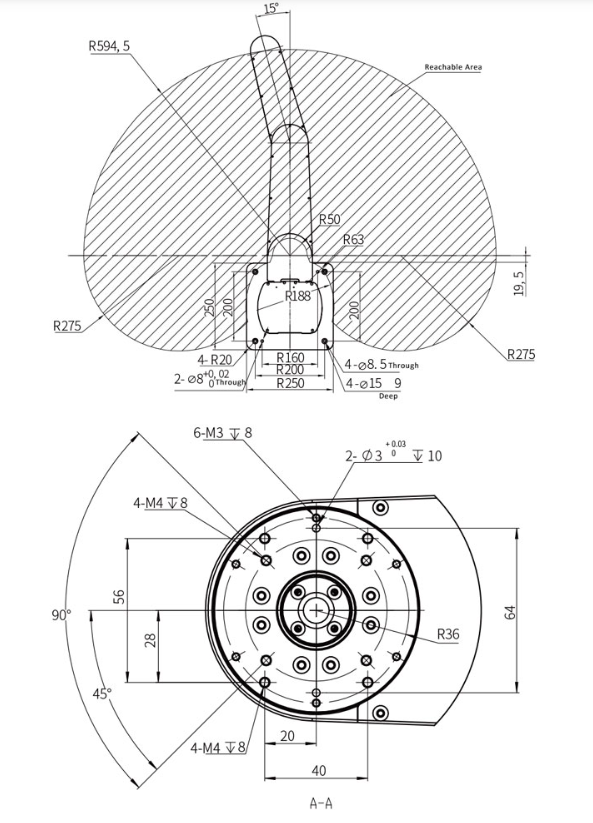
Рекомендации по разъему DB15

Рекомендуемая модель: позолоченный штекер с корпусом из ABS-пластика YL-SCD-15M, позолоченная гнездо с корпусом из ABS-пластика YL-SCD-15F
Размеры: 55 мм * 43 мм * 16 мм
(См. рисунок 5)
Схема внешней среды использования роботизированной руки

Наш бизнес


Категории товаров
-

Серия быстросменных устройств – QC-150 Круглое ручное...
-

РОБОТЫ-ДОМОЕЧНЫЕ МАШИНЫ – Робот-погрузчик SJV...
-

Умный вилочный погрузчик – SFL-CDD14-CE с лазерным жалюзи...
-

Серия TM AI COBOT – TM12M 6-осевой кобот с искусственным интеллектом
-

Серия TM AI COBOT – TM16M 6-осевой кобот с искусственным интеллектом
-

СЕРИЯ ЭЛЕКТРИЧЕСКИХ ЗАХВАТОВ HITBOT – Z-EFG-30 Paral...