Захват для коллаборативного робота – Внутренний мягкий зажимной захват для манипулятора коллаборативного робота ISC



Основная категория
Промышленный роботизированный манипулятор / Коллаборативный роботизированный манипулятор / Электрический захват / Интеллектуальный привод / Решения для автоматизации / Захват для коллаборативного робота / Мягкий захват / Захват для роботизированного манипулятора
Приложение

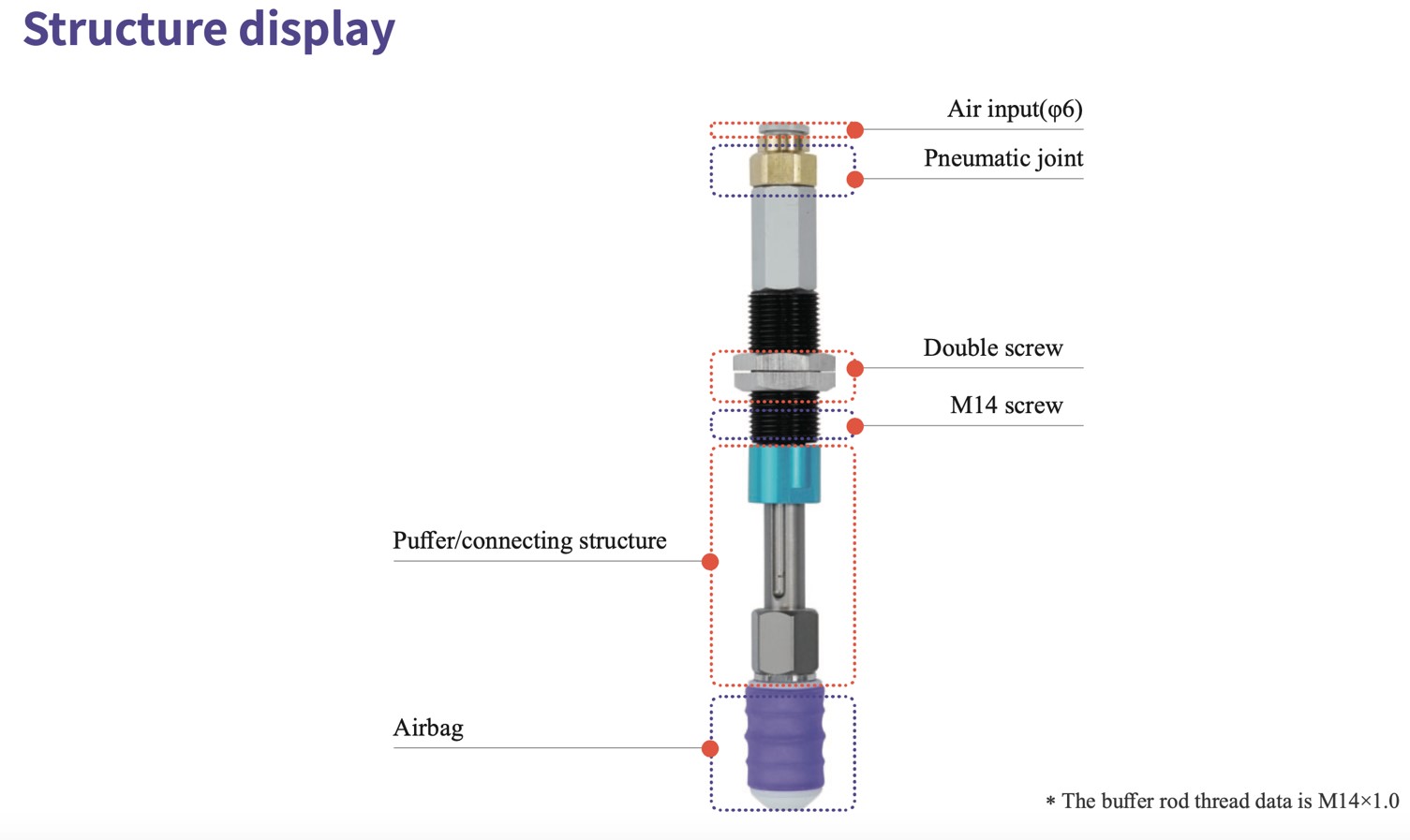
Внутренний зажим ISC — это инновационное мягкое приспособление, конструкция которого имитирует защитную морфологию рыбы-фугу. За счет надувания воздухом под давлением приспособление может расширяться и обеспечивать внутреннюю поддержку и захват.
Поскольку контактирующая с заготовкой часть выполнена из мягкой силиконовой резины, после приложения давления между жесткой опорной и контактной поверхностями образуется слой «воздушной подушки», обеспечивающий равномерное распределение напряжения и предотвращающий повреждение заготовки. Кроме того, можно регулировать давление подаваемого воздуха для контроля растяжения воздушной подушки и напряжения, контактирующего с заготовкой, что значительно повышает мягкость захватной системы.
Особенность

•Воздушные среды: чистый воздух
• Стандартный срок службы: >100 000 циклов
• Максимальная рабочая частота (количество импульсов в минуту): 300
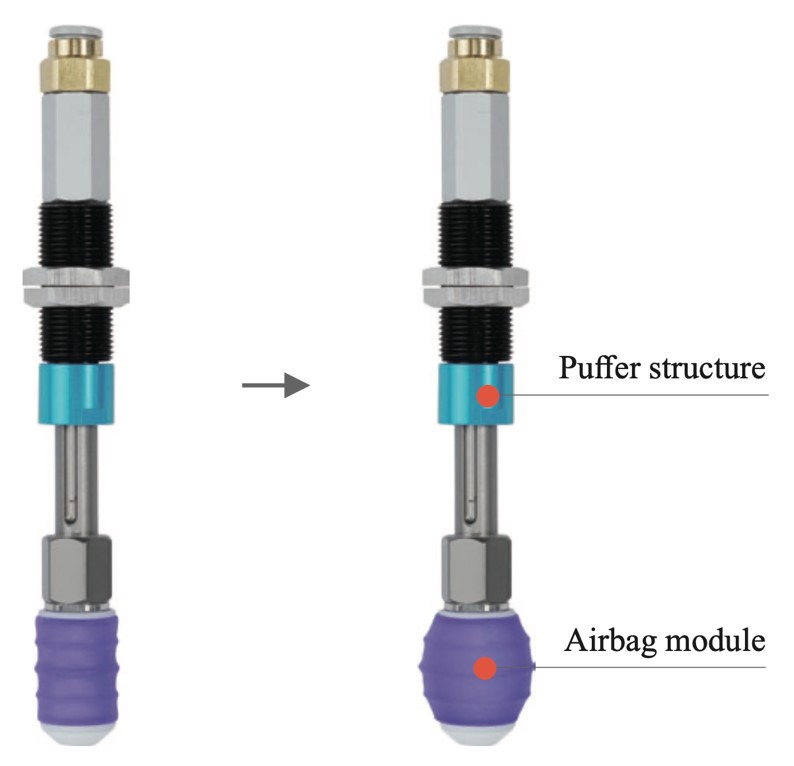
● Внутренний опорный зажим имеет особую конструкцию, напоминающую подушку безопасности, и способен вызывать различные деформации под воздействием внутреннего давления.
● Подача положительного давления: Приспособление выдвигается, самоадаптируясь и удерживаясь на внутренней поверхности объекта, завершая захват.
● Создание отрицательного давления: Прибор создает естественное состояние и освобождает объекты.
Мягкие захваты SFG используются в составе высококлассных коллаборативных роботизированных манипуляторов, в том числе:

4-осевой горизонтальный (SCARA) робот Delta
Промышленный робот-манипулятор Нати Фудзикоши
4-осевой параллельный (дельта) робот ABB
6-осевой коллаборативный робот UR
6-осевой коллаборативный робот AUBO



Параметры спецификации
Внутренний зажим для пневматической подушки ISC — это инновационное мягкое приспособление, конструкция которого имитирует защитную морфологию рыбы-фугу. За счет нагнетания воздуха под давлением зажим расширяется и обеспечивает внутреннюю поддержку и захват заготовки. Поскольку давление подаваемого воздуха можно точно контролировать, можно регулировать силу захвата заготовки зажимом, что снижает вероятность ее повреждения.
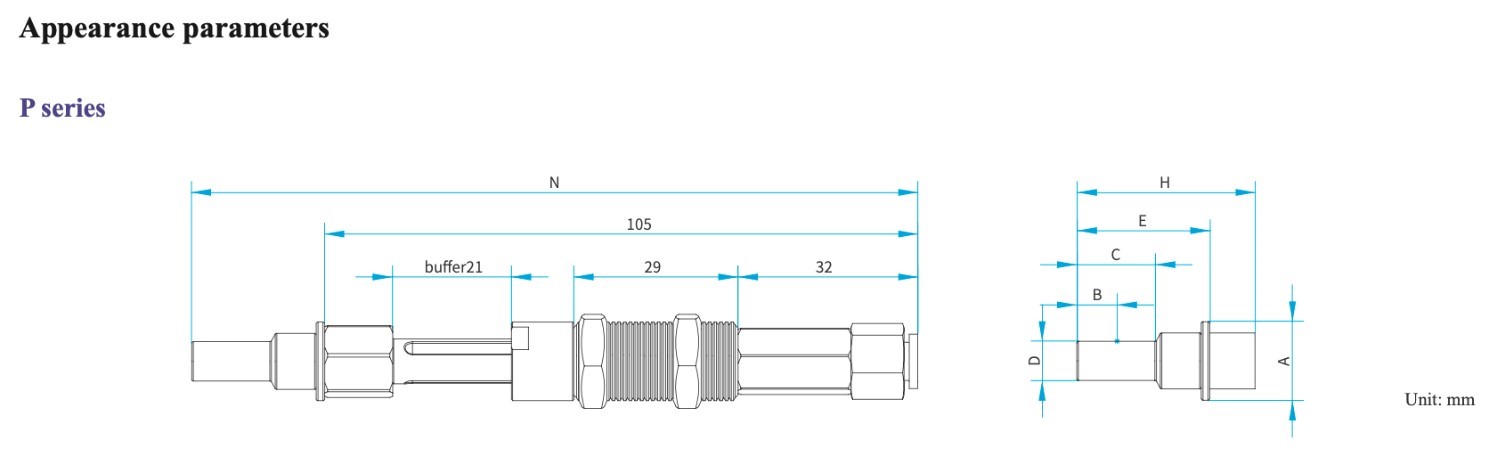
| Модель | Общая высота модуля подушки безопасности H | Диаметр контактной поверхности D | Диаметр конструктивной части А | Высота от рабочего диаметра до дна B | Высота эффективной контактной поверхности C | Рабочая высота подушки безопасности модуль E | Общая длина N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
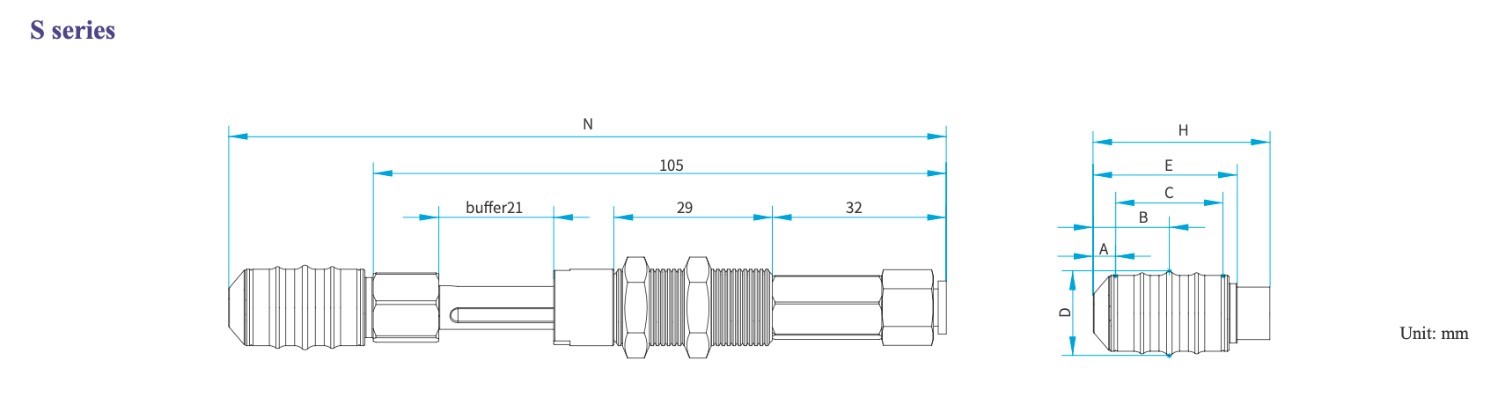
| Модель | Общая высота модуля подушки безопасности H | Диаметр контактной поверхности D | высота направляющей A | Высота от рабочего диаметра до дна B | Высота эффективной контактной поверхности C | Рабочая высота подушки безопасности модуль E | Общая длина N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
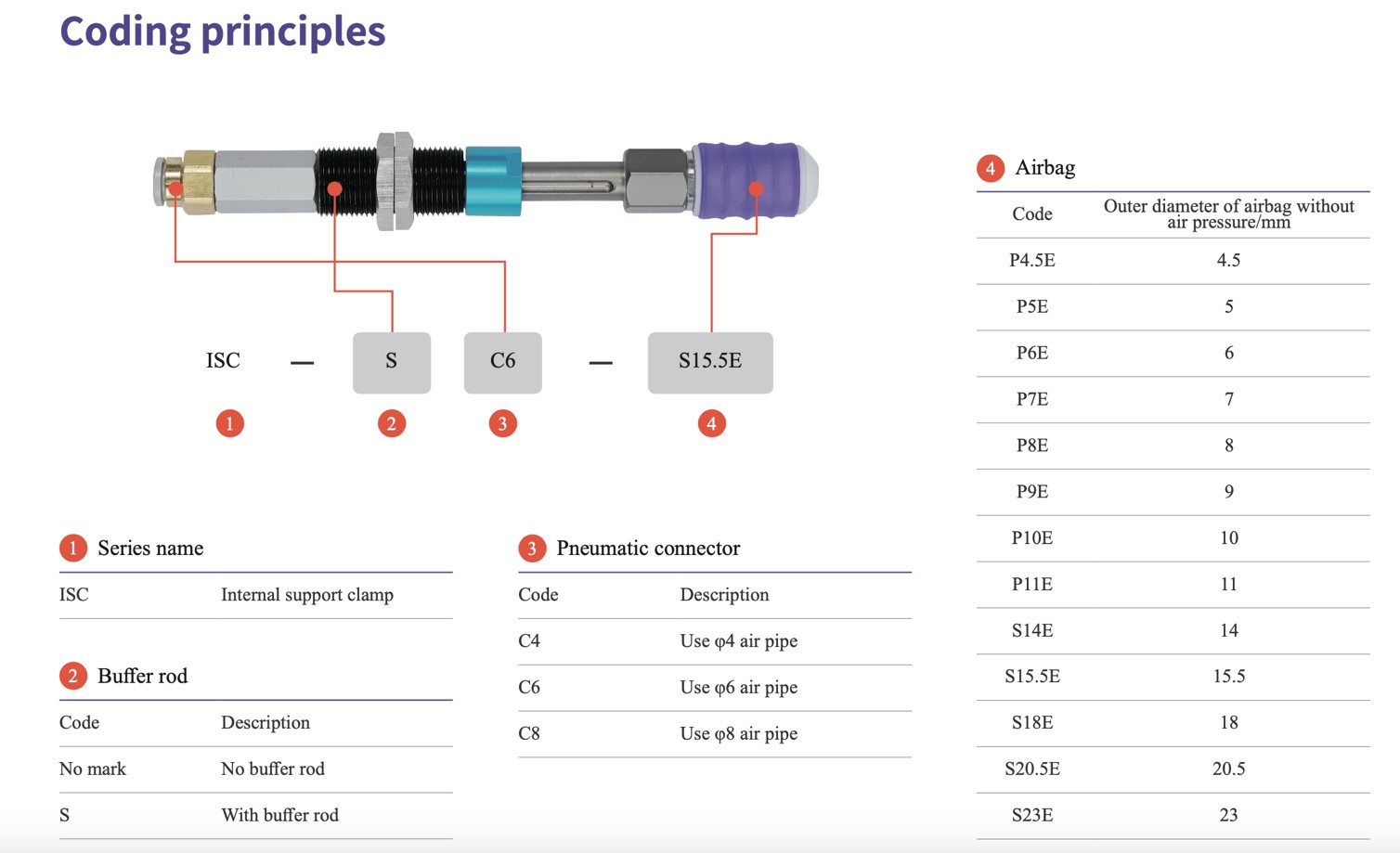
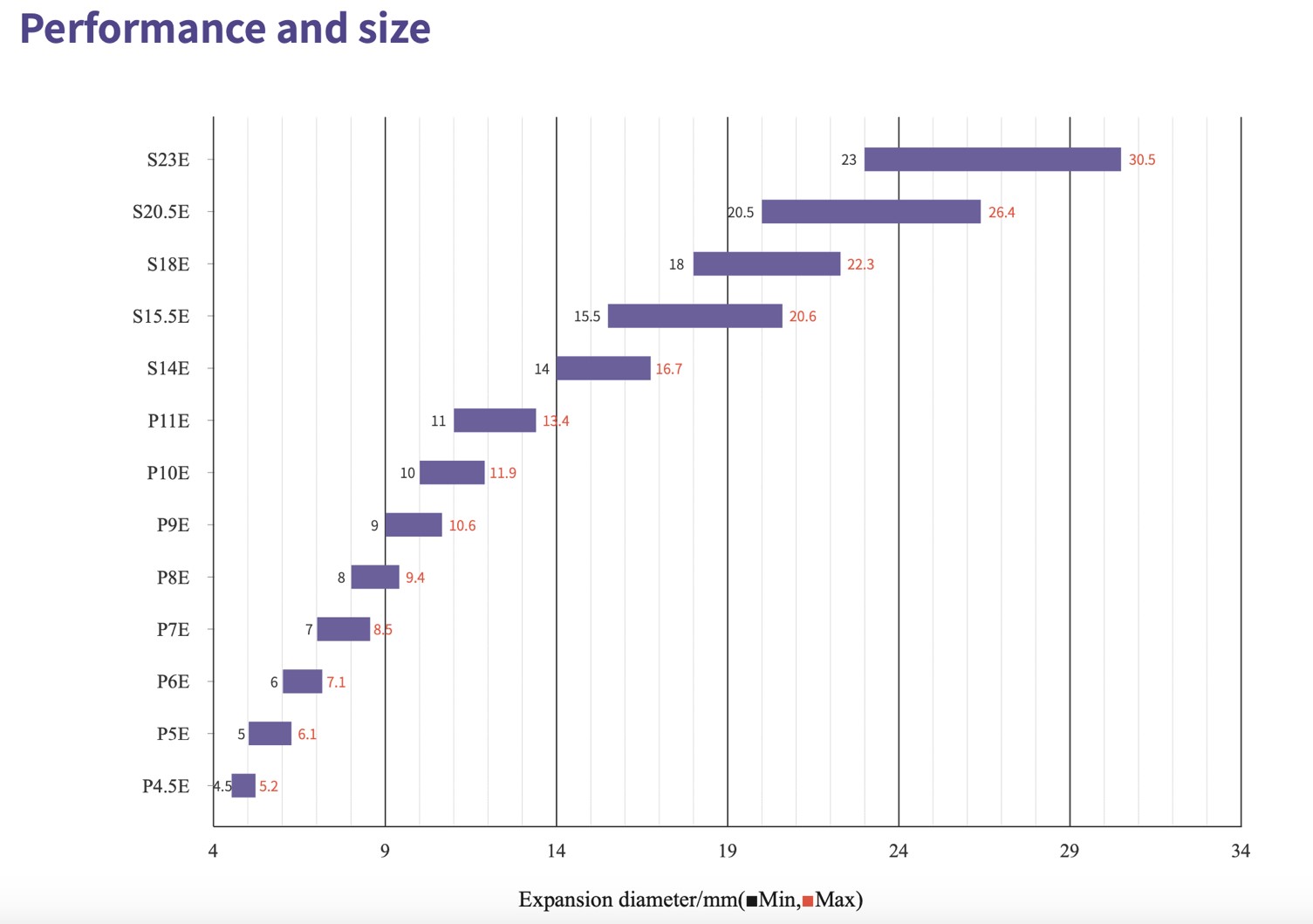
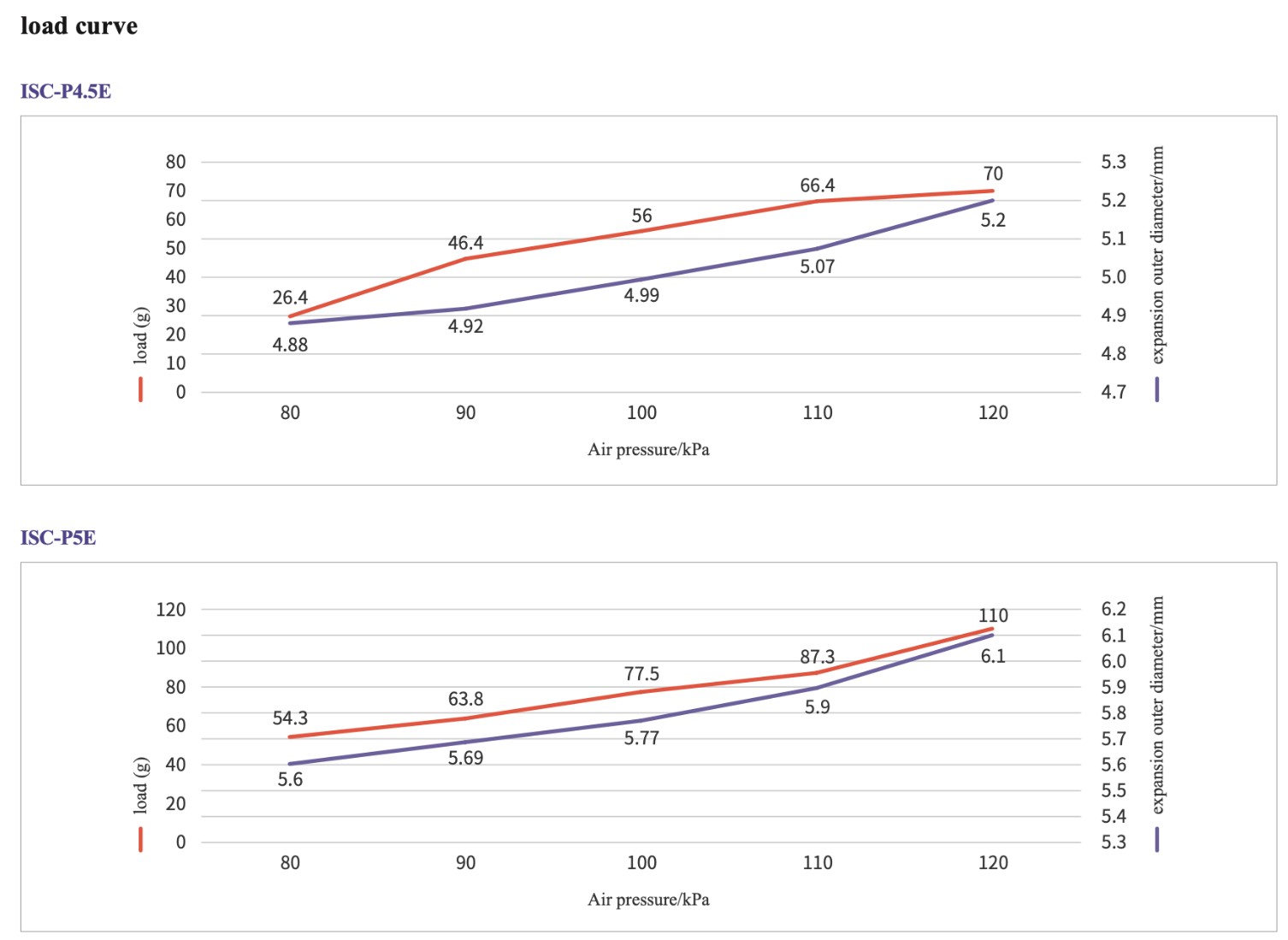
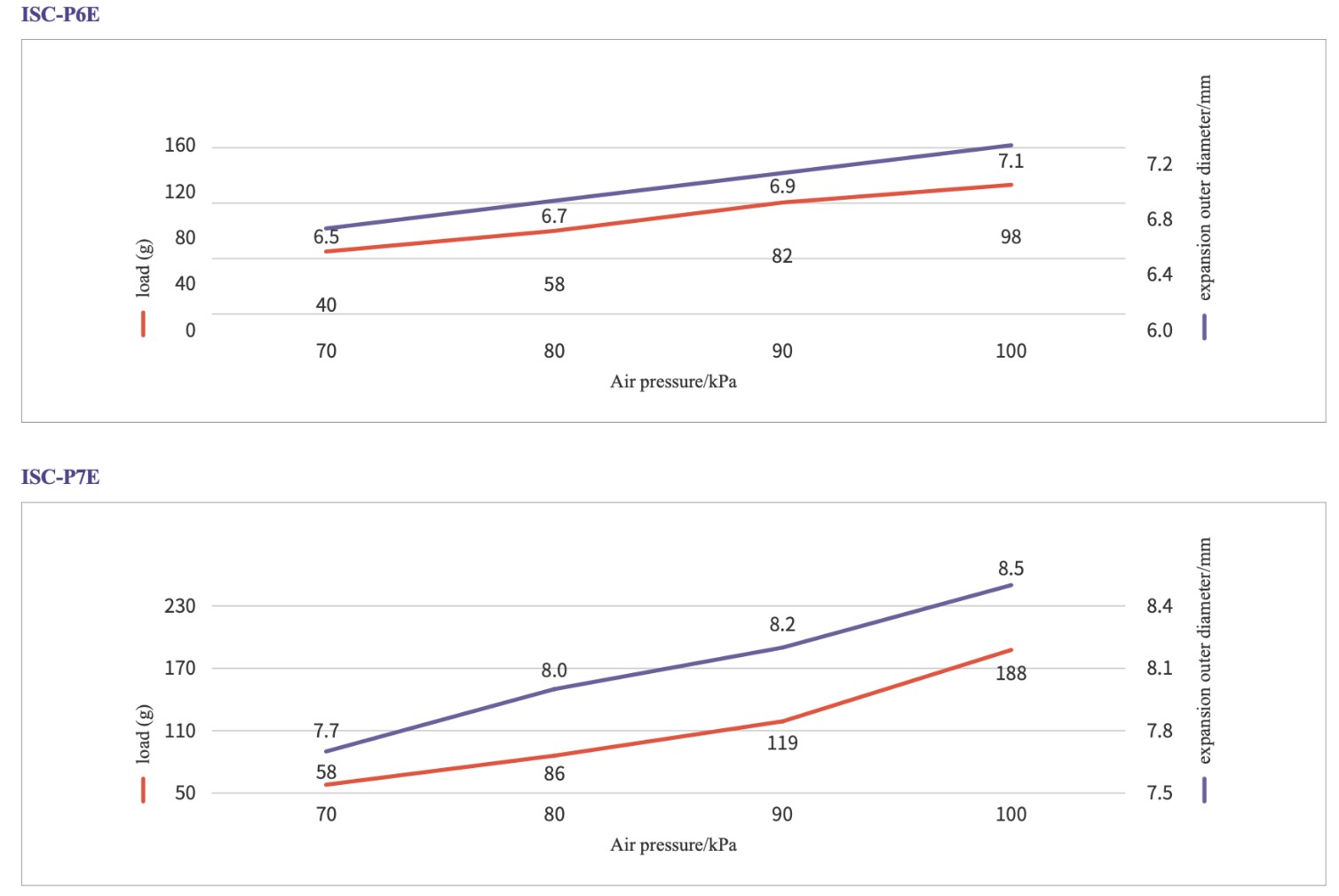
Расширенный внешний диаметр
| Модель | Диапазон рабочего давления /кПа | Максимальный внешний диаметр расширения/мм | Максимальная нагрузка/г | Вес приспособления/г | Модель металлического стержня | Размер монтажного отверстия/мм |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
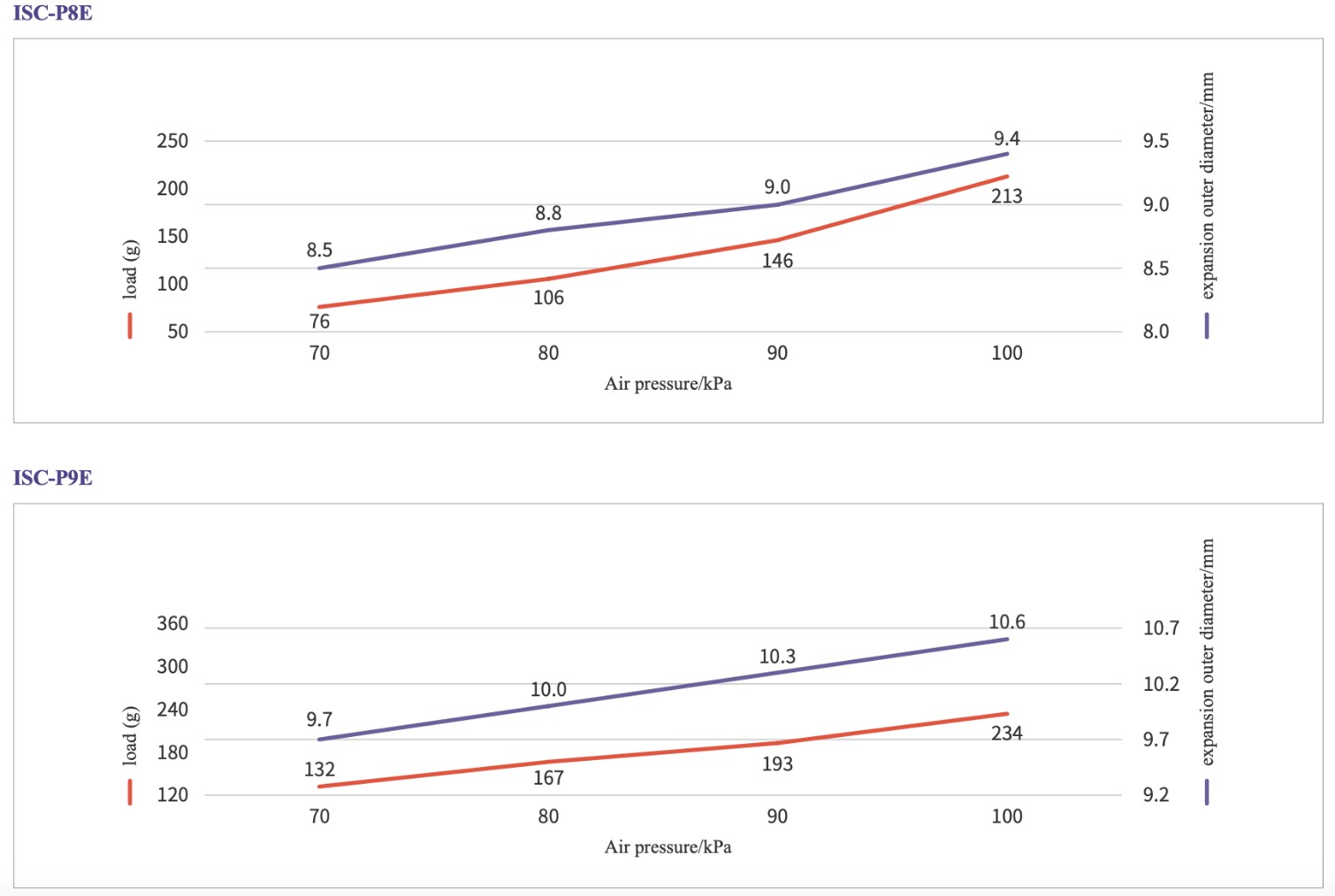
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
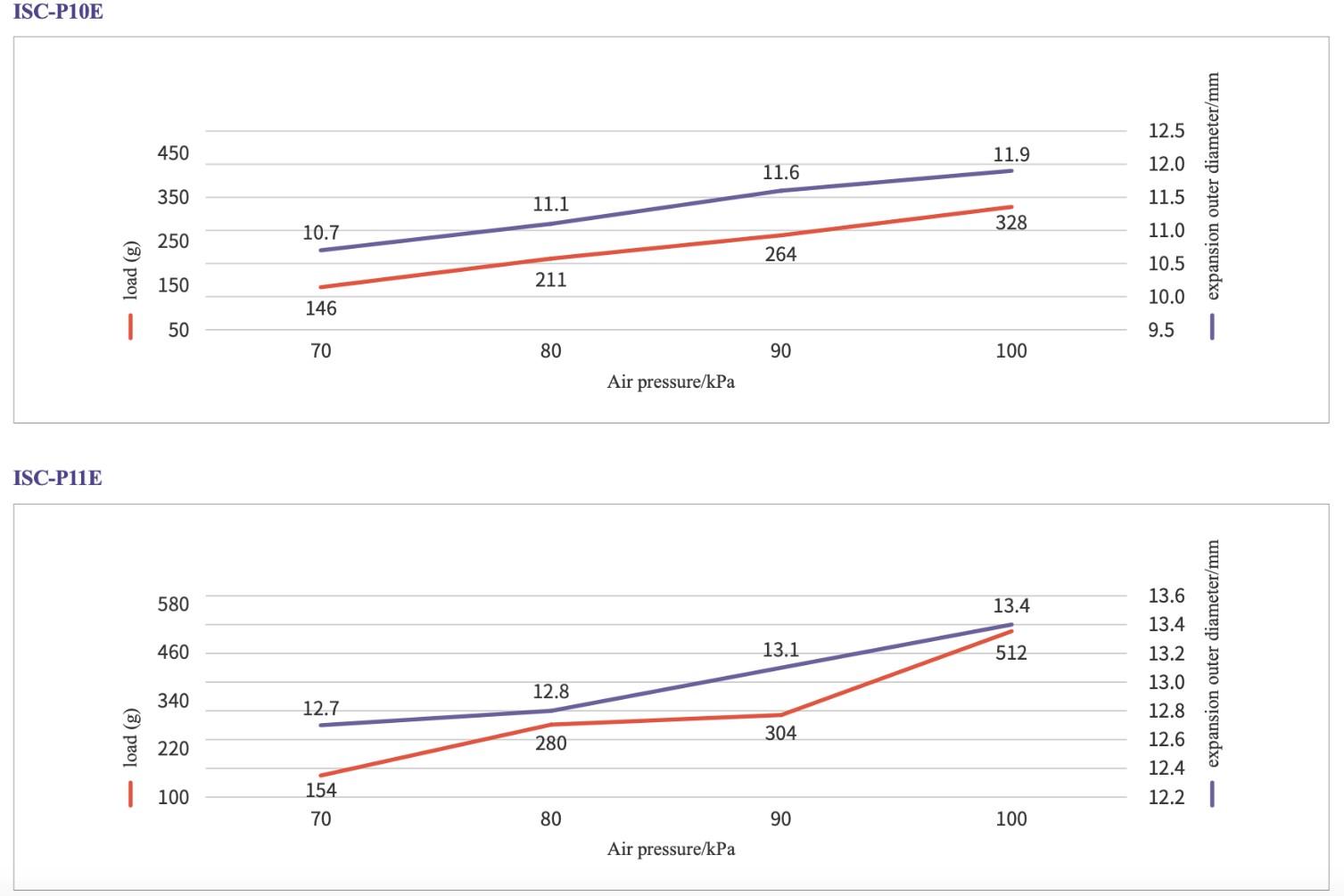
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
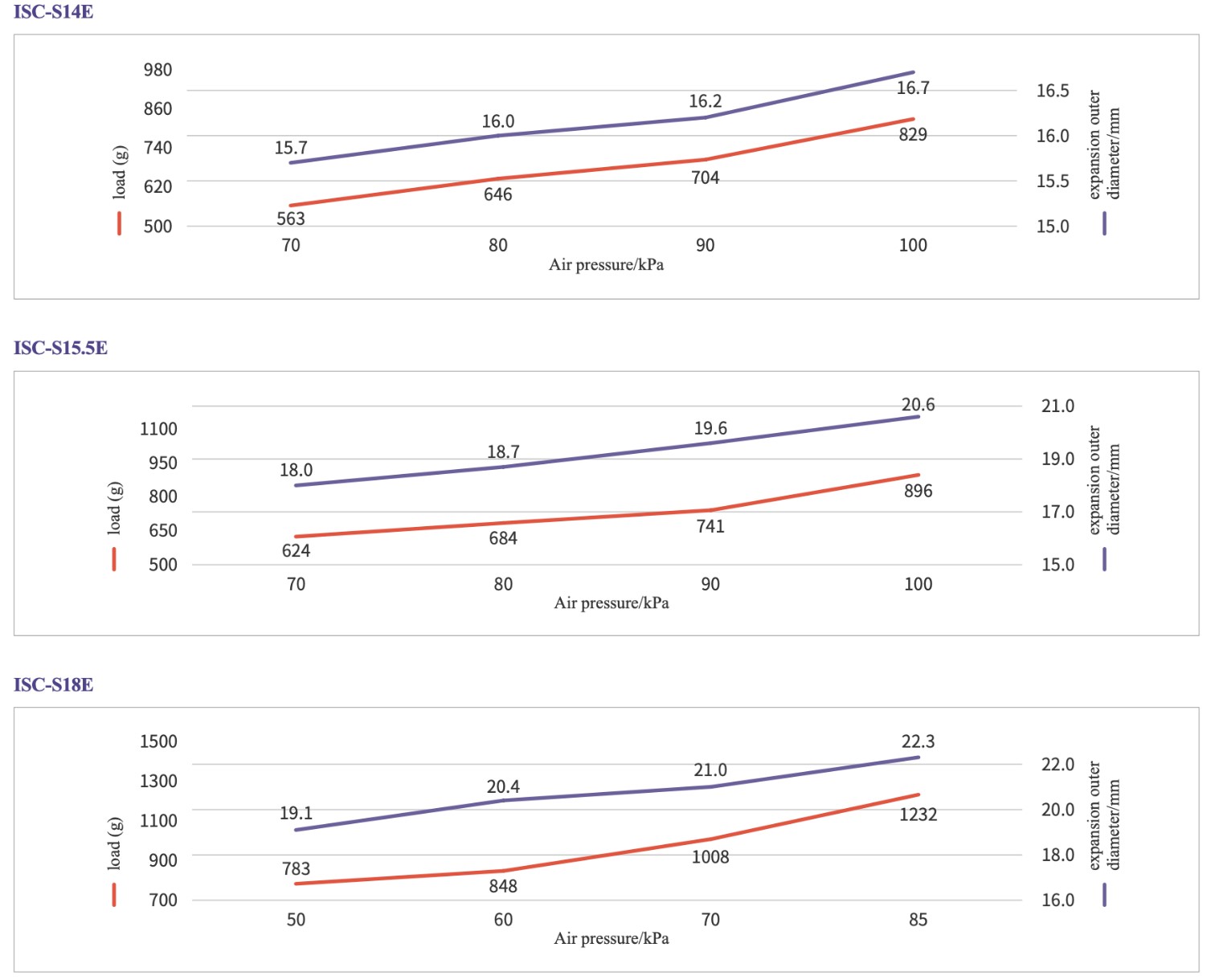
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
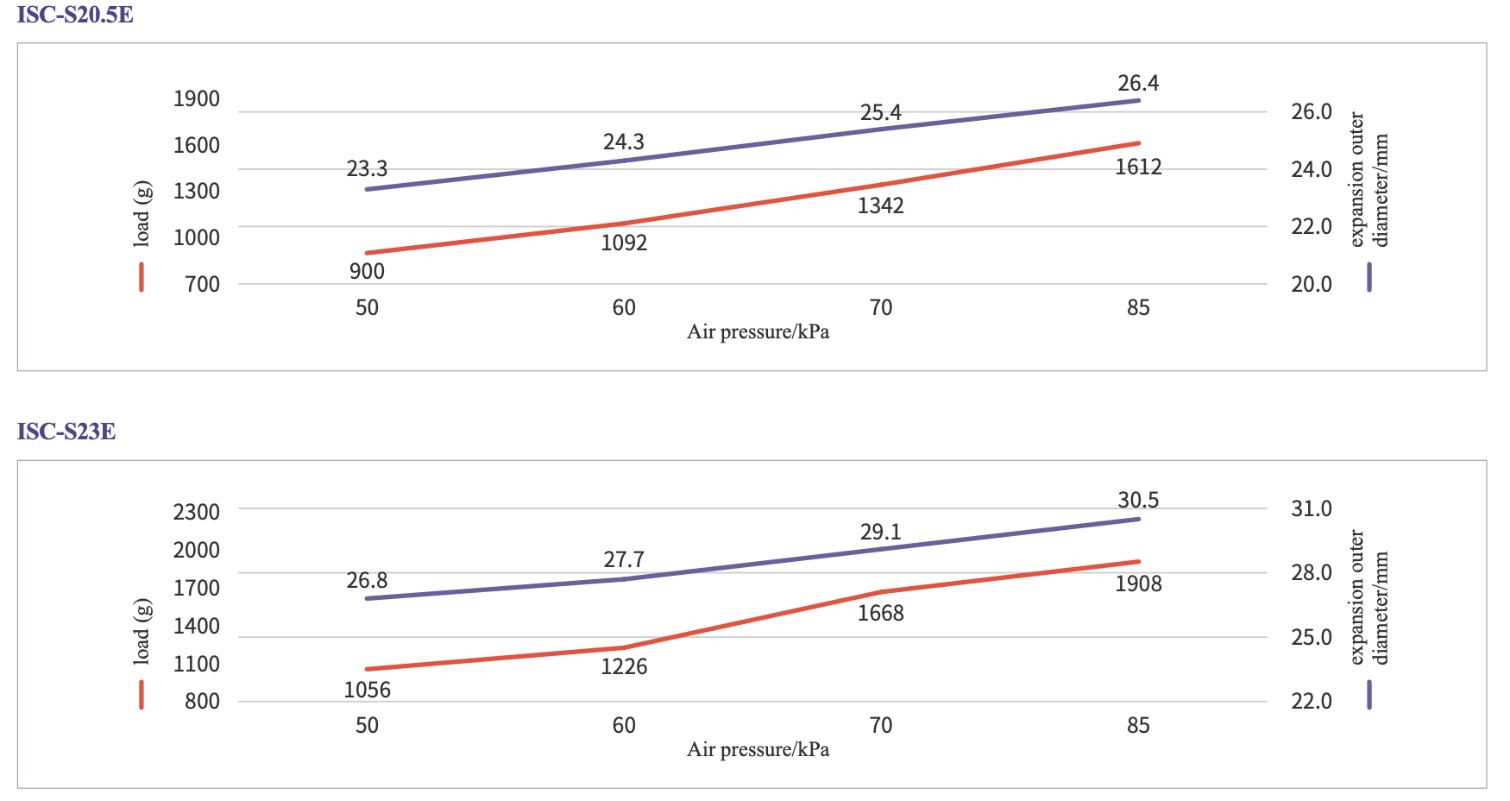
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* Для серии P максимальная нагрузка на объект испытания составляет внешний диаметр модели + 0,3 мм; для серии S максимальная нагрузка на объект испытания составляет внешний диаметр модели + 1 мм; измерение нагрузки производится с помощью профессиональных приборов.
Наш бизнес


Категории товаров
-

Сервоэлектрический захват DH ROBOTICS серии RGD –...
-

HITBOT ELECTRIC Gripper SERIES – Z-EFG-13...
-

Серия быстросменных устройств – QCA-200-D1 Быстросменное устройство...
-

Серия быстросменных устройств – QC-200 Круглое ручное...
-

Серия быстросменных устройств – QCA-S100 Быстросменное устройство...
-

Серия быстросменных устройств – QCA-S500 Быстросменное устройство...