Робот-манипулятор Szgh-Arm 2442co для совместной работы при погрузке и разгрузке.



Робот-манипулятор Szgh-Arm 2442co для совместной работы при погрузке и разгрузке.
Основная категория
Промышленные роботизированные манипуляторы / Коллаборативные роботизированные манипуляторы / Электрические захваты / Интеллектуальные приводы / Решения для автоматизации
Приложение
Коботы SCIC Z-Arm — это легкие 4-осевые коллаборативные роботы со встроенным приводным двигателем, которые, в отличие от традиционных роботов SCIC, не требуют редукторов, что снижает их стоимость на 40%. Коботы SCIC Z-Arm могут выполнять такие функции, как 3D-печать, перемещение материалов, сварка и лазерная гравировка. Они способны значительно повысить эффективность и гибкость вашей работы и производства.
Функции

Высокая точность
Повторяемость
±0,02 мм
Большой полезный груз
5 кг
Большой размах рук
Ось JI 220 мм
Ось J2 200 мм
Конкурентная цена
Качество промышленного уровня
Cконкурентоспособная цена
Сопутствующие товары



Параметры спецификации
Робот SCIC Z-Arm 2442B, разработанный компанией SCIC Tech, представляет собой легкий коллаборативный робот, простой в программировании и использовании, поддерживающий SDK. Кроме того, он поддерживает обнаружение столкновений, то есть автоматически останавливается при касании человека, что обеспечивает интеллектуальное взаимодействие человека и машины и высокий уровень безопасности.
| Коллаборативный роботизированный манипулятор Z-Arm 2442B | Параметры |
| длина плеча по одной оси | 220 мм |
| угол поворота по оси 1 | ±90° |
| Длина 2-осевого рычага | 200 мм |
| угол поворота по двум осям | ±164° (опционально: 15-345°) |
| ход по оси Z | 240 (Высоту можно настроить) |
| Диапазон вращения по оси R | ±1080° |
| Линейная скорость | 1600 мм/с (полезная нагрузка 4 кг) |
| Повторяемость | ±0,02 мм |
| Стандартная полезная нагрузка | 4 кг |
| Максимальная полезная нагрузка | 5 кг |
| Степень свободы | 4 |
| Источник питания | Адаптер 220 В/110 В, 50-60 Гц, пиковая мощность 48 В постоянного тока, 200 Вт. |
| Коммуникация | ЭН |
| Расширяемость | Встроенный контроллер движения обеспечивает 24 входа/выхода, а также возможность расширения под манипулятором. |
| По высоте оси Z можно настроить параметры. | 0,1м-0,5м |
| обучение перемещению по оси Z | / |
| Электрический интерфейс зарезервирован | Стандартная конфигурация: провода 24*23awg (неэкранированные) от панели розеток через нижнюю крышку рычага. Дополнительно: 2 вакуумные лампы φ4, проходящие через панель разъемов и фланец. |
| Совместимые электрические захваты HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Дыхание света | / |
| Диапазон движений второй руки | Стандартный угол: ±164° Дополнительный угол: 15-345° |
| Дополнительные аксессуары | / |
| Используйте окружающую среду | Температура окружающей среды: 0-45°C Влажность: 20-80% относительной влажности 85% (без образования инея) |
| Цифровой вход порта ввода/вывода (изолированный) | 9+3+разгибание предплечья (опционально) |
| Цифровой выход порта ввода/вывода (изолированный) | 9+3+разгибание предплечья (опционально) |
| Аналоговый вход порта ввода/вывода (4-20 мА) | / |
| Аналоговый выход порта ввода/вывода (4-20 мА) | / |
| высота роботизированной руки | 683 мм |
| вес роботизированной руки | ход поршня 240 мм, вес нетто 27 кг |
| Базовый размер | 250 мм * 250 мм * 15 мм |
| Расстояние между отверстиями для крепления основания | 200 мм * 200 мм, четыре винта M8 * 20 |
| Обнаружение столкновений | √ |
| Обучение перетаскиванию | √ |
Диапазон движений, версия M1 (поворот наружу)
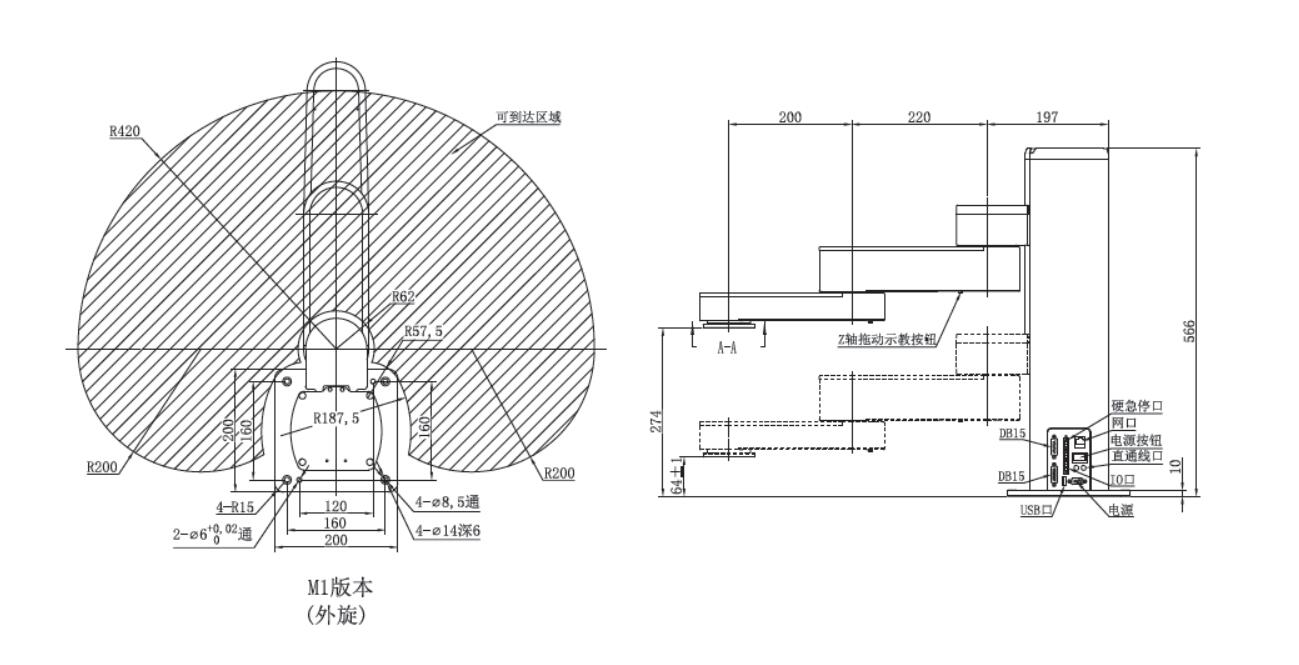
Введение в интерфейс

Интерфейс роботизированной руки Z-Arm 2442 устанавливается в двух местах: сбоку от основания роботизированной руки (обозначено как A) и на задней части концевой части руки. На интерфейсной панели A расположены: интерфейс выключателя питания (JI), интерфейс питания 24 В DB2 (J2), выход на пользовательский порт ввода/вывода DB15 (J3), пользовательский порт ввода/вывода DB15 (J4) и кнопки настройки IP-адреса (K5). Также имеется порт Ethernet (J6), системный порт ввода/вывода (J7) и два разъема для четырехжильных проводов прямого подключения J8A и J9A.
Меры предосторожности
1. Инерция полезной нагрузки
На рисунке 1 показаны центр тяжести полезной нагрузки и рекомендуемый диапазон полезной нагрузки с учетом инерции движения по оси Z.

Рисунок 1. Описание полезной нагрузки серии XX32.
2. Сила столкновения
Сила срабатывания системы защиты от столкновения горизонтального шарнира: сила срабатывания в серии XX42 составляет 40 Н.
3. Внешняя сила по оси Z
Внешняя сила, действующая на ось Z, не должна превышать 120 Н.

Рисунок 2
4. Примечания по установке модифицированной оси Z см. на рисунке 3.

Рисунок 3
Предупреждение:
(1) Для нестандартной оси Z с большим ходом жесткость оси Z уменьшается с увеличением хода. Когда ход оси Z превышает рекомендуемое значение, пользователь предъявляет требования к жесткости, и скорость превышает 50% от максимальной скорости, настоятельно рекомендуется установить опору за осью Z, чтобы обеспечить соответствие жесткости манипулятора требованиям на высоких скоростях.
Рекомендуемые значения следующие: ход по оси Z у Z-Arm серии XX42 > 600 мм.
(2) После увеличения хода по оси Z вертикальность оси Z и основания значительно снизится. Если строгие требования к вертикальности оси Z и основания неприменимы, обратитесь отдельно к техническому персоналу.
5. Горячее подключение силового кабеля запрещено. При отсоединении положительного и отрицательного полюсов блока питания появляется предупреждение о неправильном подключении.
6. Не нажимайте на горизонтальный рычаг, когда питание выключено.

Рисунок 4
Рекомендации по разъему DB15

Рисунок 5
Рекомендуемая модель: позолоченный штекер с корпусом из ABS-пластика YL-SCD-15M, позолоченная гнездо с корпусом из ABS-пластика YL-SCD-15F
Размеры: 55 мм * 43 мм * 16 мм
(См. рисунок 5)
Стол для захватов, совместимых с роботизированной рукой
| Модель роботизированной руки №. | Совместимые захваты |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Пятиосевая 3D-печать |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Схема размеров адаптера питания при установке
Блок питания XX42, конфигурация 24 В 500 Вт RSP-500-SPEC-CN, 24 В 500 Вт.

Схема внешней среды использования роботизированной руки

Наш бизнес


Категории товаров
-

Экономичная 6-осевая роботизированная рука с системой Megmeet Ehave...
-

6-осевой многопозиционный захват для перемещения грузов Scara Rob...
-
Лучшая цена на 6-осевой роботизированный сварочный аппарат...
-

Интеллектуальный 6-осевой роботизированный манипулятор с ЧПУ / механический манипулятор...
-

Автоматизированное роботизированное сварочное оборудование для промышленности...
-
Популярный роботизированный манипулятор из металла, 6-осевой механический...