Серия электрических захватов HITBOT – Z-EFG-C50 – совместный электрический захват




Основная категория
Промышленные роботизированные манипуляторы / Коллаборативные роботизированные манипуляторы / Электрические захваты / Интеллектуальные приводы / Решения для автоматизации
Приложение
Роботизированные захваты серии SCIC Z-EFG отличаются компактными размерами и встроенной сервосистемой, что позволяет добиться точного контроля скорости, положения и силы зажима. Передовая система захвата SCIC для автоматизированных решений откроет перед вами новые возможности автоматизации задач, о которых вы раньше и не подозревали.

Особенность

• Функция обнаружения падения захвата, функция вывода данных о площади падения
• Сила, положение и скорость могут точно контролироваться с помощью протокола Modbus.
·Долгий срок службы: десятки миллионов циклов, превосходящие показатели воздушных когтей.
• Встроенный контроллер: компактные размеры, простая интеграция
·Режим управления: 485 (Modbus RTU), ввод/вывод.
Ход 50 мм, усилие зажима 140 Н, совместимость с 6-осевым роботизированным манипулятором.
Высокая частота
Минимальное время хода поршня составляет 0,5 с.
Высокая точность
Повторяемость составляет ±0,03 мм.
Высокая полезная нагрузка
Рекомендуемый вес зажима ≤2 кг
Подключи и работай
Электрический захват, специально разработанный для 6-осевого роботизированного манипулятора.
Хвост сменный
Его хвост подвижен и подходит для выполнения различных задач.
Мягкое усилие зажима
Он может зажимать хрупкие и деформированные предметы.

● Способствует революции в замене пневматических захватов электрическими, первый в Китае электрический захват со встроенной сервосистемой.
● Идеальная замена для воздушного компрессора + фильтра + электромагнитного клапана + дроссельной заслонки + пневматического захвата
● Многократный срок службы, соответствующий традиционному японскому цилиндру.



Параметры спецификации
| Модель № Z-EFG-C50 | Параметры |
| Полный инсульт | регулируемый 50 мм |
| Сила захвата | регулируемая 40-140 Н |
| Повторяемость | ±0,03 мм |
| Рекомендуемый вес захвата | ≤2 кг |
| Режим передачи | Зубчатая рейка + сферическая направляющая |
| Смазка движущихся компонентов | Каждые шесть месяцев или 1 миллион перемещений/раз. |
| Время одностороннего движения при ударе | 0,5 с |
| Режим движения | Два пальца двигаются горизонтально. |
| Масса | 1 кг |
| Габариты (Д*Ш*В) | 72*72*143 мм |
| Рабочее напряжение | 24 В ± 10% |
| Номинальный ток | 0,8А |
| Пиковый ток | 2A |
| Власть | 20 Вт |
| Класс защиты | IP20 |
| Тип двигателя | бесщеточный двигатель постоянного тока |
| Диапазон рабочих температур | 5-55℃ |
| Диапазон рабочей влажности | Влажность 35-80% (без образования инея) |

| Допустимая статическая нагрузка в вертикальном направлении | |
| Фз: | 300Н |
| Допустимый крутящий момент | |
| Мх: | 7 Нм |
| Мой: | 7 Нм |
| Мз: | 7 Нм |
Интегрированный привод и контроллер
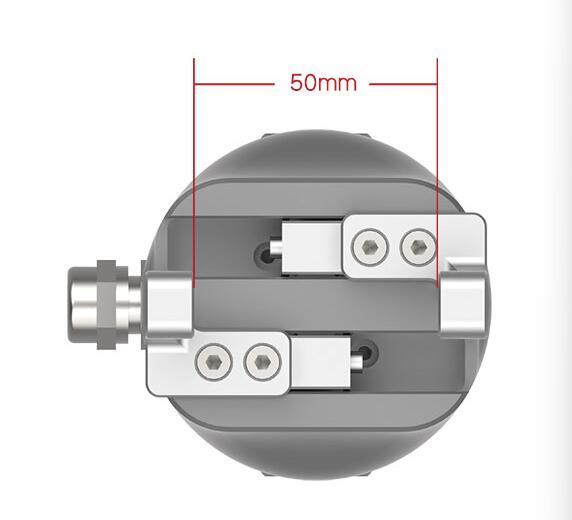
Электрический захват Z-EFG-C50 имеет встроенную сервосистему, его общий ход составляет 50 мм, усилие зажима — 40–140 Н, ход и усилие зажима регулируются, а повторяемость составляет ±0,03 мм.

Совместим с шестиосевым роботизированным манипулятором.

Электрический захват совместим с 6-осевым роботизированным манипулятором, что обеспечивает простоту подключения и использования. Минимальное время хода составляет всего 0,5 с, что позволяет удовлетворить требования к зажиму и обеспечить стабильную работу производственной линии.
Компактный размер, простота установки.

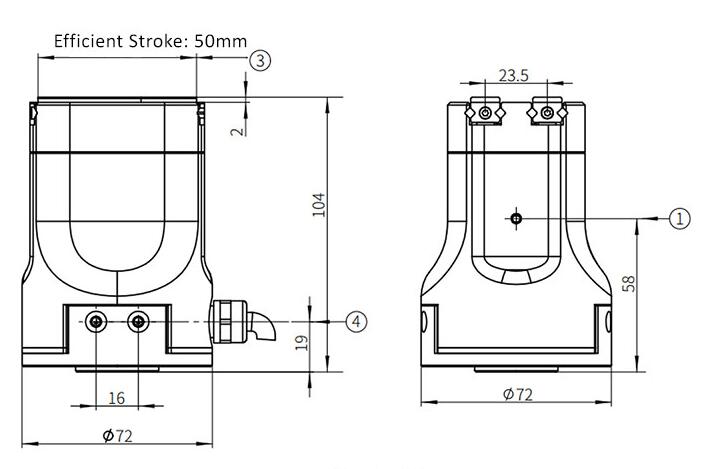
Z-EFG-C50 использует зубчатую передачу + шариковые направляющие, габариты изделия составляют Д72*Ш72*В143 мм, что позволяет гибко размещать его в условиях ограниченного пространства.


Быстрая реакция, точность управления силой.

Минимальное время одного хода составляет всего 0,5 с, что позволяет справляться с задачами быстрого зажима; хвостовая часть может быть заменена в любое время, и заказчики могут регулировать хвостовую часть в соответствии со своими потребностями.
Многочисленные режимы управления, простота в эксплуатации.

Конфигурация Z-EFG-C50 проста, он имеет множество режимов управления, включая 485 (Modbus RTU), импульсный режим, ввод/вывод, и совместим с основной системой управления ПЛК.

Смещение центра тяжести нагрузки
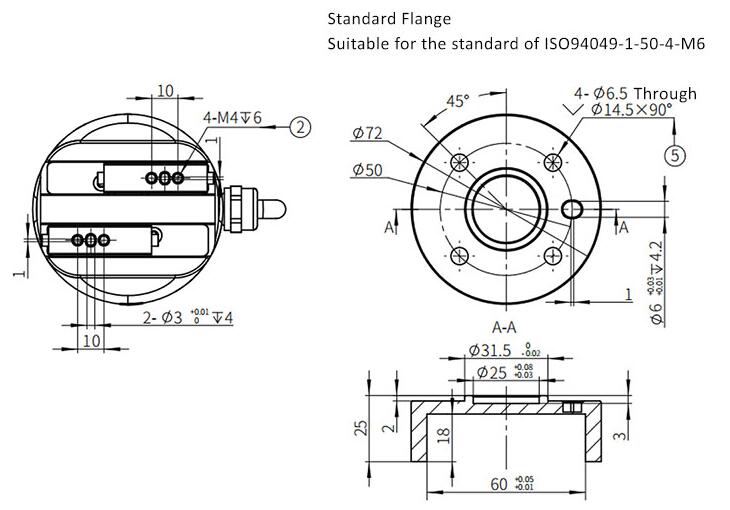
1. Светодиодный индикатор
2. Место установки: используйте 4 винта M4.
3. Ход электрического захвата составляет 50 мм.
4. Выходное отверстие для гайки
5. Место установки: используйте 4 винта M6 для соединения с клеммным фланцем манипулятора коллаборативного робота.
Наш бизнес


Категории товаров
-

Сервоэлектрический захват DH ROBOTICS серии RGI –...
-

Сервоэлектрический захват DH ROBOTICS серии CG – ...
-

Сервоэлектрический захват DH ROBOTICS серии RGI –...
-

Сервоэлектрический захват DH ROBOTICS серии PGC –...
-

Сервоэлектрический захват DH ROBOTICS серии PGE –...
-

СЕРИЯ ЭЛЕКТРИЧЕСКИХ ЗАХВАТОВ HITBOT – Z-EFG-12 Paral...