СТАНДАРТ AMRS – Автомобильные мобильные базы AMB-300XS

Основная категория
AGV AMR / подъемный AGV AMR / автоматизированное транспортное средство AGV / автономный мобильный робот AMR / автомобиль AGV AMR для промышленной обработки материалов / робот AGV китайского производителя / складской AMR / подъемный робот AMR с лазерной SLAM-навигацией / мобильный робот AGV AMR / шасси AGV AMR с лазерной SLAM-навигацией / интеллектуальный логистический робот
Приложение

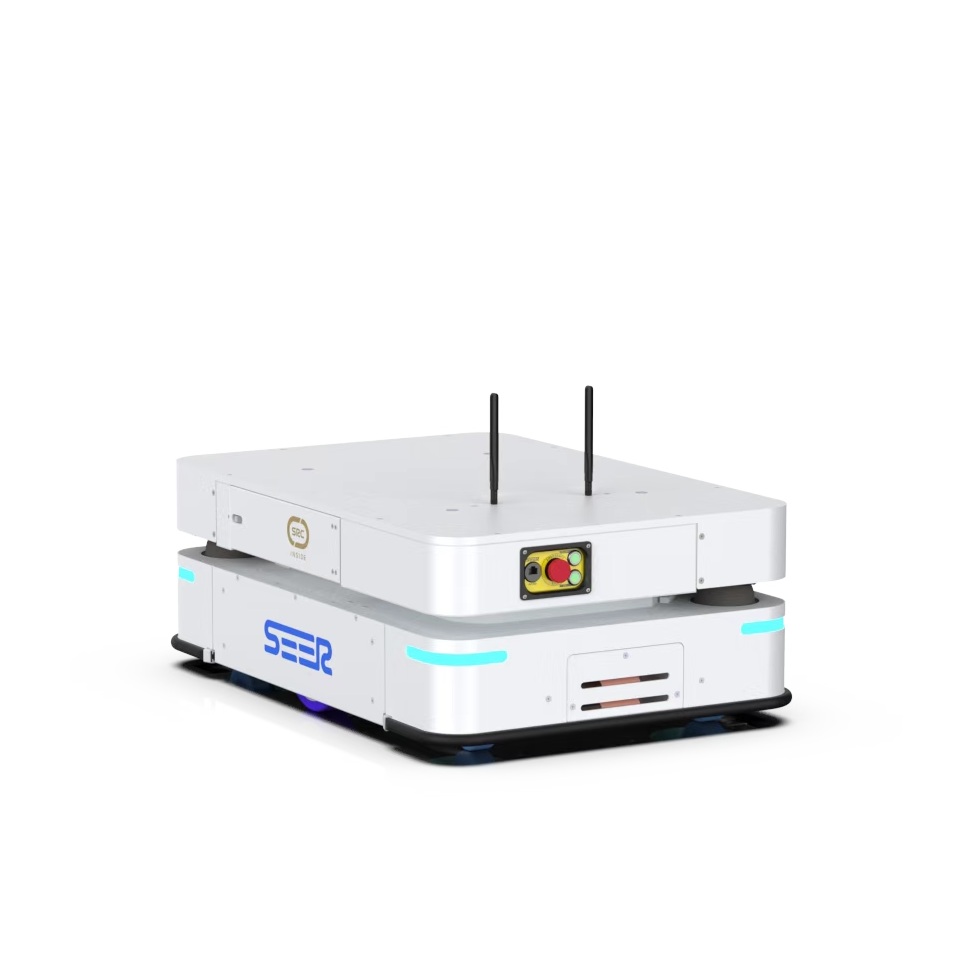
Беспилотное шасси серии AMB (Auto Mobile Base) для автономных транспортных средств AGV — это универсальное шасси, разработанное для автономных транспортных средств AGV, которое предоставляет ряд функций, таких как редактирование карт и навигация по местоположению. Это беспилотное шасси для тележек AGV имеет множество интерфейсов, таких как ввод/вывод и CAN, для установки различных верхних модулей, а также мощное клиентское программное обеспечение и системы диспетчеризации, что помогает пользователям быстро завершить производство и внедрение автономных транспортных средств AGV. На верхней части беспилотного шасси серии AMB для автономных транспортных средств AGV имеются четыре монтажных отверстия, которые поддерживают произвольное расширение за счет домкратов, роликов, манипуляторов, скрытого тягового привода, дисплея и т. д., что позволяет использовать одно шасси для различных целей. AMB в сочетании с расширенной цифровизацией предприятия SEER позволяет реализовать унифицированную диспетчеризацию и развертывание сотен продуктов AMB одновременно, что значительно повышает уровень интеллектуальности внутренней логистики и транспортировки на заводе.
Особенность

• Номинальная нагрузка: 300 кг
• Продолжительность: 12 часов
• Количество лидаров: 2
• Диаметр вращения: 972,6 мм
• Скорость навигации: ≤1,5 м/с
· Точность позиционирования: ±5, 0,5 мм
● Сертификат безопасности CE, выдающиеся характеристики и превосходные стандарты безопасности, заложенные в конструкцию.
Сертификация CE (ISO 3691-4:2020) обеспечивает высочайший уровень гарантии качества и безопасности, что способствует экспорту.
Интерфейсы ввода/вывода, CAN, RS485 и другие зарезервированы для расширения возможностей механизма верхнего уровня, что позволяет реализовать различные приложения для робототехники.
● Точное позиционирование ±5 мм
Точность позиционирования в системе навигации составляет ±5 мм, а скорость навигации — 1,5 м/с, что позволяет предприятиям работать эффективно.
● Широкий функционал и простота расширения
Основные функции включают редактирование карт, редактирование моделей, позиционирование и навигацию, базовую модель движения (дифференциальную), дополнительные модули (ролики, домкраты, скрытое тяговое усилие), интерфейсы и т. д.
● Чистота класса 4, более надежная работа
Прошел тест на чистоту ISO КЛАССА 4, может непосредственно использоваться в отраслях с высокими требованиями к чистоте, таких как полупроводниковая промышленность.
● 3D-обнаружение препятствий, повышенная безопасность
Для дальнейшего повышения уровня безопасности продукции поддерживаются функции обнаружения 3D-препятствий и навигации с использованием отражателей.



Параметры спецификации
| Модель продукта | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| Основные параметры | метод навигации | Лазерный SLAM | Лазерный SLAM | Лазерный SLAM |
| режим движения | Двухколесный дифференциал | Двухколесный дифференциал | Двухколесный дифференциал | |
| цвет раковины | Жемчужно-белый / Жемчужно-черный | Жемчужно-белый / Жемчужно-черный | RAL9003 | |
| Д*Ш*В (мм) | 800*560*200 | 1000*700*200 | 842*582*300 | |
| Диаметр вращения (мм) | 840 | 1040 | 972.6 | |
| Вес (с батареей) (кг) | 66 | 144 | 120 | |
| Грузоподъемность (кг) | 150 | 300 | 300 | |
| Минимальная допустимая ширина прохода (мм) | 700 | 840 | 722 | |
| Параметры производительности | ||||
| Точность позиционирования при навигации (мм*) | ±5 | ±5 | ±5 | |
| Точность угла навигации (°) | ±0,5 | ±0,5 | ±0,5 | |
| Скорость навигации (м/с) | ≤1,4 | ≤1,4 | ≤1,5 | |
| Параметры батареи | Технические характеристики батареи (В/Ач) | 48/35 (Тройной литий) | 48/52 (Тройной литий) | 48/40 (Тройной литий) |
| Общее время автономной работы (ч) | 12 | 12 | 12 | |
| Время зарядки (10-80%) (ч) | ≤2 | ≤ 2,5 | ≤ 2,5 | |
| Способ зарядки | Ручной/Автоматический/Переключатель | Ручной/Автоматический/Переключатель | Ручной/Автоматический/Переключатель | |
| Расширенные интерфейсы | Power DO | Семиконтактный (общая нагрузочная способность 24 В/2 А) | Семиконтактный (общая нагрузочная способность 24 В/2 А) | Трехпозиционный (общая нагрузочная способность 24 В/2 А) |
| DI | Десятисторонний (NPN) | Десятисторонний (NPN) | Одиннадцатисторонний (PNP/NPN) | |
| интерфейс аварийной остановки | Двусторонний выход | Двусторонний выход | Двусторонний выход | |
| Проводная сеть | Трехсторонний гигабитный Ethernet-разъем RJ45 | Трехсторонний гигабитный Ethernet-разъем RJ45 | Двусторонний гигабитный Ethernet M12 X-Code | |
| Конфигурации | номер лидара | 1 или 2 | 1 или 2 | 2 (SICK nanoScan3) |
| HMI-дисплей | ● | ● | - | |
| Кнопка аварийной остановки | ● | ● | ● | |
| Зуммер | ● | ● | - | |
| Докладчик | ● | ● | ● | |
| Рассеянный свет | ● | ● | ● | |
| Бамперная полоса | - | - | ● | |
| Функции | Роуминг Wi-Fi | ● | ● | ● |
| Автоматическая зарядка | ● | ● | ● | |
| Распознавание на полке | ● | ● | ● | |
| Навигация с помощью лазерного отражателя | 〇 | 〇 | 〇 | |
| 3D-обход препятствий | 〇 | 〇 | 〇 | |
| Сертификаты | ISO 3691-4 | - | - | ● |
| ЭМС/ЭСД | ● | ● | ● | |
| ООН38.3 | ● | ● | ● | |
| Чистота | - | Класс ISO 4 | Класс ISO 4 | |
* Точность навигации обычно относится к повторяемости точности, с которой робот достигает станции.
● Стандартный 〇 Дополнительный Нет
Наш бизнес


Категории товаров
-

Умный вилочный погрузчик – SFL-CBD15 Laser SLAM Sma...
-

СТАНДАРТ АМРС – Автомобильные мобильные базы АМБ-150...
-

Режим AMR/AGV – автоматизация нового поколения...
-

РОБОТЫ-ДОМОЕЧНИКИ – Лазерный подъемный робот SLAM...
-

РОБОТЫ-ДОМОЕЧНЫЕ МАШИНЫ – Всенаправленные подъемные механизмы...
-

Умный вилочный погрузчик – SFL-CPD15-T с лазерным шлагом...